标题:机器人组件和人形机器人
专利公开号:CN220408778U
摘要
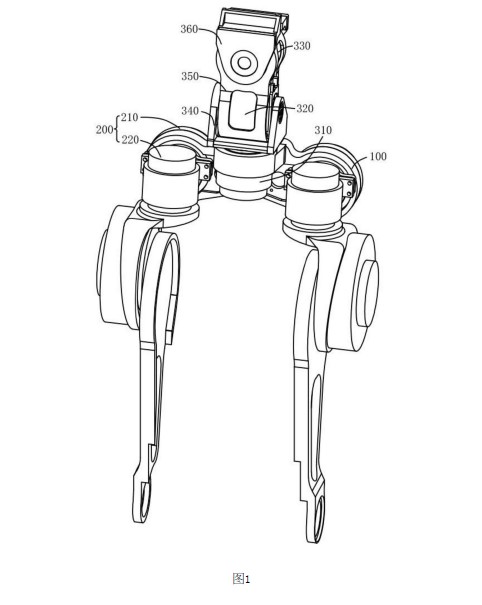
本申请涉及机器人技术领域,公开一种机器人组件和人形机器人,机器人组件包括:支架;髋部组件,设于支架,髋部组件包括两个第一髋部执行器,两个第一髋部执行器之间设有第一预设空间;腰部组件,设于支架,腰部组件用于与机器人躯干相连接,腰部组件包括三个腰部执行器,三个腰部执行器串联设置,从而带动机器人躯干旋转、俯仰和侧摆运动;其中,至少一个腰部执行器设于第一预设空间内。本实施可将腰部组件的底端设于第一预设空间内,充分利用了髋部组件内的空间,使机器人组件的结构较为紧凑,降低腰部组件的设置高度,从而降低人形机器人的身长长度,使人形机器人能够更加符合人体的真实身高,提高人形机器人的拟人化程度。
背景及相关技术问题
- 随着机器人的快速发展,其应用领域越来越广泛,机器人首先要满足自身的运动功能。
- 机器人的腰部一般有旋转、俯仰和倾斜运动,需要设置多个执行器来实现,这使得机器人腰部的长度较长、占用空间较大,导致机器人无法贴近真实人形身高。
- 传统机器人腰部采用两个执行器带动传动连杆的安装结构,执行器的运动受其他执行器与传动结构的限制,机器人躯干的俯仰和侧摆运动范围较小。
- 机器人腰部组件的长度较长,占用空间大,导致机器人的身长较长,不符合人体的真实身高,拟人化程度低。
专利创新点
- 腰部执行器的设置方式:腰部组件包括三个串联设置的腰部执行器,任一腰部执行器单独运动即可实现机器人躯干的一种运动,相较于腰部采用两个执行器带动传动连杆的安装结构,这种设置方式使一执行器的运动不受其他执行器与传动结构的限制,能够使机器人躯干实现较大范围的俯仰和侧摆运动。
- 空间利用:髋部组件的两个第一髋部执行器之间设有第一预设空间,至少一个腰部执行器设于该空间内,充分利用了髋部组件内的空间,使机器人组件的结构较为紧凑。
- 降低腰部组件高度:将腰部组件的安装位置下移,减少了腰部组件的最上端与髋部组件之间的距离,从而降低了腰部组件的设置高度,能够降低人形机器人的身长长度,使人形机器人更加符合人体的真实身高,提高了拟人化程度。
- 髋部组件结构:髋部组件还包括两个第二髋部执行器,两个第二髋部执行器与两个第一髋部执行器围合出第二预设空间,其中第二预设空间包括第一预设空间,增加了腰部执行器的安装空间,便于腰部执行器的安装、拆卸与运动。
- 腰部组件具体结构:
·
腰部组件的第一连接件与第一执行器的输出端相连接,构造有第一安装空间,容纳壳的第一子容纳壳可转动地设于该空间内,第二执行器设于第一子容纳壳内且输出端与第一连接件连接,能带动第一子容纳壳相对于第一连接件转动,实现机器人躯干的侧摆或俯仰运动。
·
第一连接件的第一板件沿第二执行器的轴向延伸,能与第一子容纳壳相抵接,使第一子容纳壳在第一极限位置时停止摆动,提高机器人组件的运动稳定性和可靠性。
·
容纳壳还包括与第一子容纳壳相连接的第二子容纳壳,第三执行器设于第二子容纳壳内,第二连接件与机器人躯干相连接且构造有第二安装空间,第二子容纳壳设于该空间内,第三执行器能带动第二连接件相对于第二子容纳壳摆动,实现机器人躯干的侧摆或俯仰运动。
·
第二连接件的第二板件沿第三执行器的轴向延伸,能与第二子容纳壳相抵接,使第二连接件在第二极限位置时停止摆动,提高机器人组件的运动稳定性和可靠性。
专利技术优势
- 提高运动灵活性:三个腰部执行器串联设置,任一执行器单独运动可实现机器人躯干的一种运动,不受其他执行器与传动结构的限制,能使机器人躯干实现较大范围的俯仰和侧摆运动,提高了运动灵活性。
- 结构紧凑:至少一个腰部执行器设于髋部组件的第一预设空间内,充分利用了髋部组件内的空间,使机器人组件的结构较为紧凑。
- 符合人体身高:降低了腰部组件的设置高度,从而能够降低人形机器人的身长长度,使人形机器人更加符合人体的真实身高。
- 提高拟人化程度:通过优化腰部组件的结构和设置,使人形机器人在外观和运动方式上更接近人体,提高了拟人化程度。
- 增加安装空间:髋部组件的两个第一髋部执行器与两个第二髋部执行器围合出的第二预设空间包括第一预设空间,增加了腰部执行器的安装空间,便于腰部执行器的安装、拆卸与运动。
- 提高稳定性和可靠性:通过第一连接件的第一板件与第一子容纳壳的抵接,以及第二连接件的第二板件与第二子容纳壳的抵接,能使第一子容纳壳在第一极限位置、第二连接件在第二极限位置时停止摆动,提高了机器人组件的运动稳定性和可靠性。


发表评论 取消回复