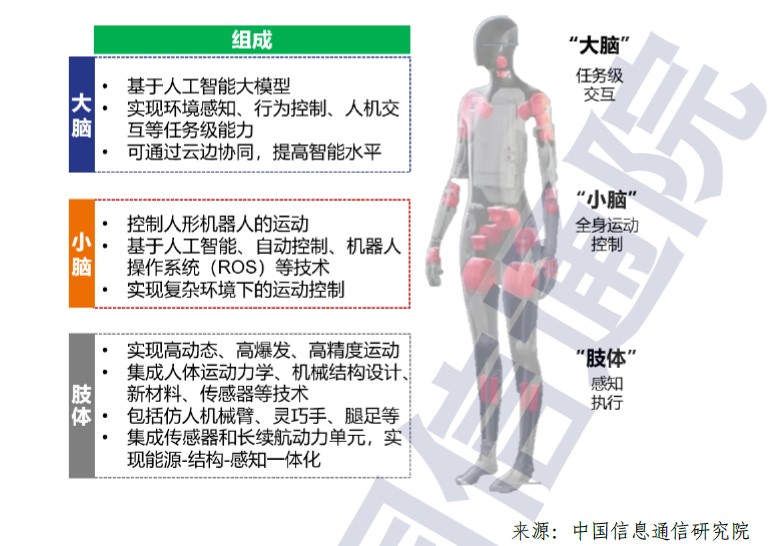
人形机器人的 “大脑” 和 “小脑” 是对其核心控制系统的形象化比喻,二者在技术定位、功能模块、技术原理及应用场景等方面存在显著区别,具体如下:
一、技术定位与功能差异
| 维度 | 大脑(认知决策系统) | 小脑(运动控制系统) |
|---|---|---|
| 核心定位 | 负责 “思考与决策”,相当于机器人的智能中枢 | 负责 “动作执行”,相当于机器人的运动神经中枢 |
| 主要功能 | 环境感知、任务理解、策略规划、自主决策 | 关节控制、步态规划、平衡调节、动作精准执行 |
| 技术目标 | 让机器人具备类似人类的认知能力,理解复杂任务并制定策略 | 让机器人实现稳定行走、灵活操作等运动能力 |
二、技术原理与模块构成
1. 大脑:基于 AI 大模型的认知系统
- 核心技术
2. 小脑:运动控制与动力学系统
- 核心技术
三、技术挑战与发展重点
1. 大脑:认知智能的局限性
- 挑战
- 复杂场景泛化能力不足(如非结构化环境中的任务自适应)。
- 实时决策效率低(大模型推理耗时可能导致动作延迟)。
- 发展方向
- 轻量化大模型部署(如边缘计算优化),提升实时性。
- 具身智能(Embodied AI):让机器人通过 “实践” 学习任务,而非依赖预设规则。
2. 小脑:运动精度与能耗平衡
- 挑战
- 高动态运动时的能耗控制(如快速行走时电机发热导致效率下降)。
- 硬件成本高(如高精度减速器依赖进口,推高整机价格)。
- 发展方向
四、协同工作机制
- 大脑与小脑的交互流程
- 大脑接收任务:如 “从传送带抓取零件并放置到货架”。
- 环境感知与规划:大脑通过视觉识别零件位置、货架坐标,规划抓取路径与动作顺序。
- 指令下发小脑:将 “抓取姿态”“移动轨迹” 等参数转化为关节控制信号(如手腕旋转角度、手指抓握力度)。
- 小脑执行与反馈:实时调整关节运动,确保动作精准执行,并将姿态数据反馈给大脑(如 “已成功抓取零件”)。
人形机器人的 “大脑” 与 “小脑” 软件部分的开发和协作,是实现机器人智能化和精准运动控制的关键。“大脑” 负责智能决策,“小脑” 负责运动执行,二者紧密配合,使机器人完成各种复杂任务。
“大脑” 软件主导开发者
- 科技巨头与 AI 企业:像百度、谷歌、英伟达这类在人工智能领域有深厚积累的企业,凭借其在 AI 算法、大模型研发方面的技术优势,开发出用于机器人环境感知、决策规划的软件。百度的文心一言大模型,若应用于人形机器人,能赋予其理解自然语言指令、识别复杂环境等能力。
- 专注机器人研发的企业:例如优必选、波士顿动力等,它们根据机器人的应用场景和功能需求,开发定制化的 “大脑” 软件。波士顿动力为其机器人开发的软件,使机器人在复杂地形运动时能快速做出决策,保持平衡和稳定。
- 科研机构:高校和科研院所在人工智能、机器人领域的研究成果,也为 “大脑” 软件的开发提供了理论和技术支持。一些高校研发的新型机器学习算法,可被应用到机器人 “大脑” 软件中,提升其智能水平。
“小脑” 软件主导开发者
- 专业运动控制企业:固高科技、雷赛智能等企业,专注于运动控制技术,为机器人开发底层运动控制软件。固高科技的运动控制软件,能精确控制机器人关节的运动,实现高精度的动作执行。
- 机器人整机厂商:特斯拉、宇树科技等在研发机器人整机的过程中,会自主开发适配的 “小脑” 软件,以确保机器人的硬件和软件高度匹配。特斯拉在人形机器人 Optimus 的研发中,开发了专门的运动控制软件,实现其高效的行走和操作功能。
- 第三方 “小脑” 企业:桥介数物这类企业,通过开发通用的 “小脑” 底层运控算法,为众多机器人企业赋能。桥介数物帮助多家人形机器人公司完成强化学习运动控制 demo 开发,提升了这些企业的机器人运动控制能力。
“大脑” 与 “小脑” 软件的配合机制
- 任务规划与指令传递:“大脑” 接收外界指令或自主感知环境后,进行任务规划和决策,将抽象的任务转化为具体的动作指令,如目标位置、动作顺序等,并传递给 “小脑”。在机器人进行物料搬运任务时,“大脑” 识别物料位置和目标存放点,规划出运动路径和抓取动作,然后将这些指令发送给 “小脑”。
- 运动控制与反馈调整:“小脑” 接收到 “大脑” 的指令后,通过运动控制算法将指令转化为对机器人关节和电机的控制信号,实现精确的动作控制。在执行过程中,“小脑” 会实时收集传感器反馈信息,如关节角度、力觉、视觉等,对运动进行调整。机器人抓取物料时,“小脑” 根据力觉传感器反馈调整抓取力度,防止物料掉落。
- 协同学习与优化:“大脑” 和 “小脑” 在运行过程中相互学习和优化。“大脑” 根据 “小脑” 的动作执行结果,评估任务完成情况,对后续的任务规划进行优化;“小脑” 根据 “大脑” 的决策和实际运动效果,调整运动控制参数,提高运动性能。机器人在多次执行相同任务的过程中,“大脑” 和 “小脑” 不断协同优化,提升任务完成的效率和质量。


发表评论 取消回复