标题:
人形机器人的躯干组件及人形机器人
专利公开号:
CN220972445U
摘要
本申请涉及机器人技术领域,公开了一种人形机器人的躯干组件。该人形机器人的躯干组件包括:腰部结构件和背部结构件,腰部结构件的第一下连接部用于与人形机器人的下肢组件适配连接;背部结构件的背部用于安装电池,背部结构件的第二下连接部与腰部结构件的上连接部适配连接;相对于上连接部的位置,第一下连接部向背部结构件的背向方向延伸,使躯干组件在安装状态下,腰部结构件、背部结构件以及背部结构件的背部所安装的电池,三者所构成整体的重心在水平面的投影位置,趋近于第一下连接部在水平面的投影位置。采用该人形机器人的躯干组件,能够提高安装电池后的人形机器人的平衡能力。本申请实施例还公开了包含上述躯干组件的人形机器人。
背景及相关技术问题
·
仿生机器人外在形态向人形发展,人形机器人符合人类审美且能与人类生存环境更好契合,但以双足作为移动功能件的人形机器人对平衡度要求更高,通常在结构和控制算法方面进行优化。
·
为人形机器人配置质量较大的电池以具备一定续航能力时,会影响机器人的平衡,而车轮式或四足式机器人的电池安装方案不适合人形机器人。
·
为使人形机器人适用于更广泛的应用场景,需要配置蓄电池并具备一定续航能力,但质量较大的电池容易影响机器人的平衡。
·
车轮式或四足式机器人的电池安装方案不适合直接转用于人形机器人
专利创新点
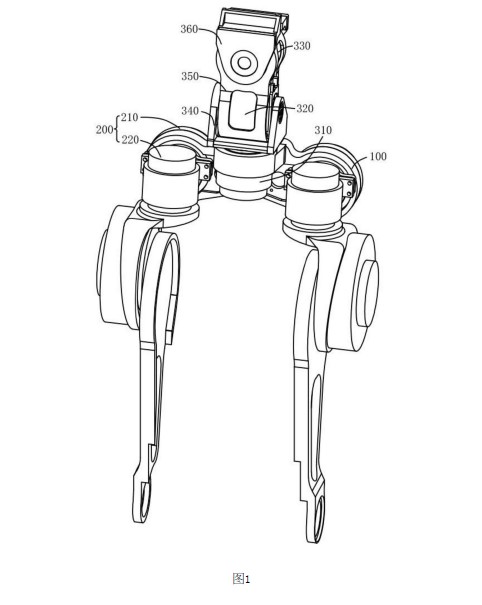
- 躯干组件结构设计:
·
腰部结构件与背部结构件的连接设计:通过腰部结构件的上连接部(包括左右限位凸台和前后限位连接板)与背部结构件的第二下连接部(包括左右限位凹槽)的适配连接,使腰部结构件与背部结构件在左右方向和前后方向相互固定。
·
重心分布设计:相对于腰部结构件的上连接部,第一下连接部沿背部结构件的背向方向延伸,使得躯干组件在安装状态下,腰部结构件、背部结构件以及背部所安装的电池三者所构成整体的重心在水平面的投影位置,趋近于第一下连接部在水平面的投影位置,从而提高安装电池后的人形机器人的平衡能力。
- 腰部结构件的具体设计:
·
形状与弯曲方向:腰部结构件的下部和上部呈板状,且下部和上部的表面与板状中部的表面呈预设角度,该预设角度与腰部结构件的板状中部的长度正相关。腰部结构件为矩形环状,上部和下部位于矩形环状的短边处。这样的设计在确保人形机器人具备符合人类审美观的仿生外观的基础上,使整体重心分布更利于平衡。
- 背部结构件与电池的相关设计:
·
电池安装空间设计:背部结构件的背部限定有电池安装空间,且在躯干组件安装状态下,电池安装空间在水平面的第一投影,覆盖第一下连接部在水平面的第二投影的中部或全部。
·
固定件与固定孔设计:背部结构件的背部设置电池固定件,电池固定件的下部边缘开设第一固定孔;背部结构件的第二下连接部开设第二固定孔;前后限位连接板开设第三固定孔。第一固定孔、第二固定孔和第三固定孔三者的位置存在对应关系,便于将电池固定件、背部结构件和腰部结构件三者固定连接,减少安装工序,提高安装效率。
专利技术优势
- 提高平衡能力:通过合理设计腰部结构件、背部结构件以及电池的位置关系,使三者整体的重心向下肢组件趋近,便于使下肢组件以及躯干组件二者所形成的重心落在人形机器人的双足位置,提高了安装电池后的人形机器人的平衡能力,使人形机器人在静止站立状态下达到较佳的平衡效果,其整体的重心在脚底所在平面的投影可位于双脚的骰骨位置或纵弓位置。
- 降低设计难度:在设计机器人下肢组件的质量分布过程中,可减少对躯干组件重心的顾忌,降低机器人整体质量分布的设计难度。
- 优化连接方式:腰部结构件与背部结构件通过特定的连接方式(如左右限位凸台与左右限位凹槽的配合,以及前后限位连接板与第二下连接部的抵靠连接),相对静止的效果更佳,同时对连接结构的配合误差要求降低,便于部件的加工和匹配安装。
- 提高安装效率:背部结构件、电池固定件和腰部结构件上的固定孔位置存在对应关系,能够减少安装工序,提高安装效率。


发表评论 取消回复