标题:
一种人形机器人的腿部动力结构和人形机器人
专利公开号:
CN118289111A
摘要
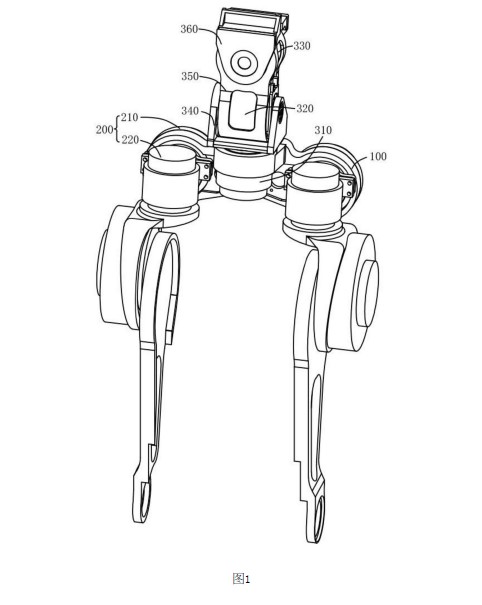
本发明涉及人形机器人技术领域,公开了一种人形机器人的腿部动力结构和人形机器人。本发明的一种人形机器人的腿部动力结构,包括设于人形机器人腰部的,依次连接的跨步驱动单元、大腿体组件、小腿体组件和脚部组件,所述跨步驱动单元,用于带动整个腿部动力结构前后摆动;大腿体组件包括第一大腿体、第二大腿体,小腿体组件包括小腿体,脚部组件包括脚部支撑件;第一大腿体上部设有髋关节驱动单元,以带动整个腿部动力结构左右摆动;第一大腿体和所述第二大腿体之间设有第一驱动单元,以实现第一大腿体与第二大腿体相对周向转动。本发明整个腿部动力结构设计合理,结构紧凑,很好的满足了人形机器人实现各种动作姿态的要求。
背景及相关技术描述
近年来,机器人产业发展迅猛,人形机器人备受关注,其腿部动力结构成为设计重点。中国专利(公布号 CN111098951A)公开的一种类人形服务机器人行走结构,髋部与躯干部之间配置两组脚连接件与连杆构成四杆机构,髋舵机驱动躯干部摆动,但此方案动作少,拟人效果不佳,推广受限,且腿部动力结构设计与布局不合理,整体臃肿不紧凑。
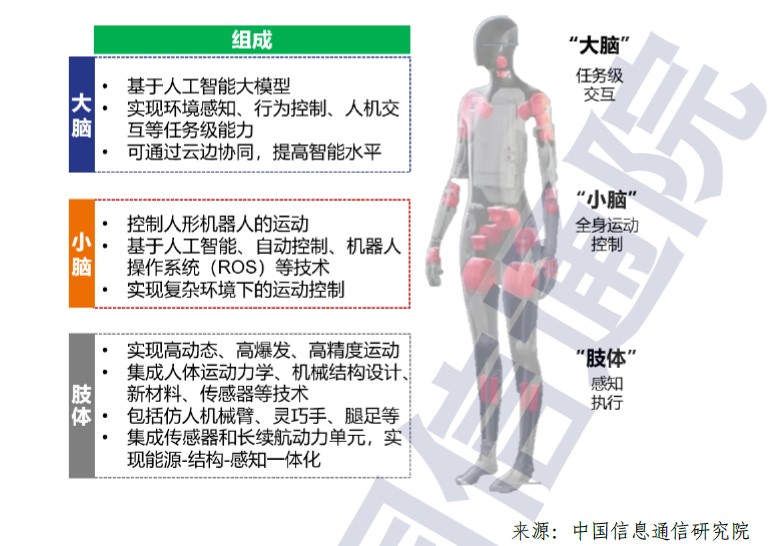
该专利想解决的问题包括:实现多层自由度运动以满足复杂运动需求;保证运动性能的同时简化结构、缩小体积;提高驱动效率、降低功耗;增强结构稳定性和可靠性。其设计理念为:实现拟人化动作,如前后、左右、周向摆动及转动等;结构紧凑,减少空间占用,提升灵活性和运动效率;采用模块化设计,各部分独立驱动,方便维护升级;运用不同类型驱动单元满足多样运动需求。通过合理设计,使人形机器人能做出各种拟人化腿部及脚部动作,满足动作姿态要求,结构合理紧凑,利于推广使用。


发表评论 取消回复