标题:
SYSTEMS AND METHODS FOR A ROBOT KNEE JOINT ASSEMBLY
专利号 : WO2024073135 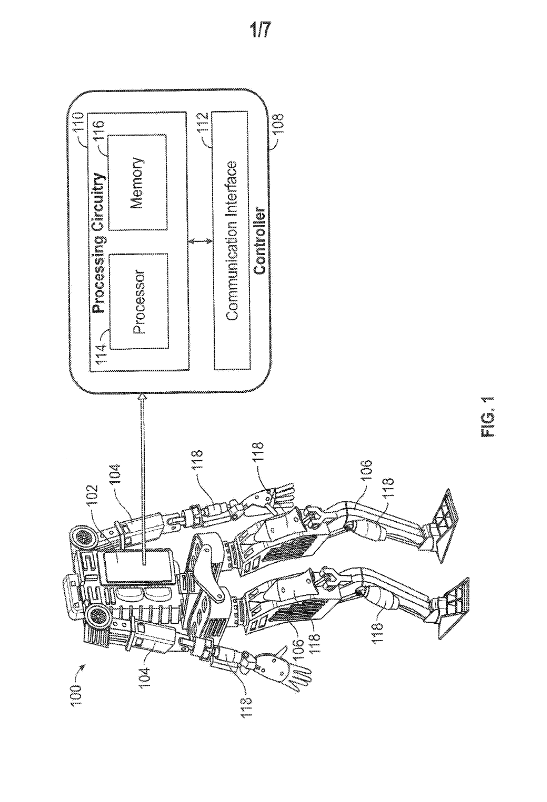
摘要:
本文公开了一种膝关节组装件,包括一个第一连杆构件,该第一连杆构件的第一端与机器人的上腿部分机械耦合,并被配置为相对于上腿部分围绕第一枢轴旋转;以及一个第二连杆构件,其第一端与机器人的下腿部分机械耦合。下腿部分可以与上腿部分机械耦合,并被配置为相对于上腿部分围绕第二枢轴旋转。一个线性执行器装置可以与第一连杆构件的第二端和第二连杆构件的第二端机械耦合,当被激活时,可以使第一连杆构件相对于机器人的上腿部分围绕第一枢轴旋转,并使腿相对于上腿部分围绕第二枢轴旋转。
背景及相关描述:
机器人可以被视为链条或关节的集合,这些关节使得机器人能够进行所需的运动。每个关节都允许相邻的结构或元素相对移动。相邻元件的运动由与关节相关的一个或多个致动器驱动。计算机系统控制这些执行器以实现期望的运动。
关节的设计决定了相邻元件的运动范围。此外,关节设计还会影响所需执行器的数量和/或类型,以及执行器的效率。
机器人的可靠性和效率在很大程度上取决于所采用的关节设计。一个精心设计的关节可以增强相邻元件的运动范围,减少机器人消耗的功率。在当前的公开中,描述了用于配置为模拟人类膝关节的膝关节组件的系统和方法。特别是,本文描述的膝关节组件允许机器人腿的下部具有类似于人类膝关节的旋转范围。此外,本文所述的膝关节组件可以由单个线性致动器驱动,能够在满足扭矩、速度和运动范围的同时,最小化功耗或最大化效率。
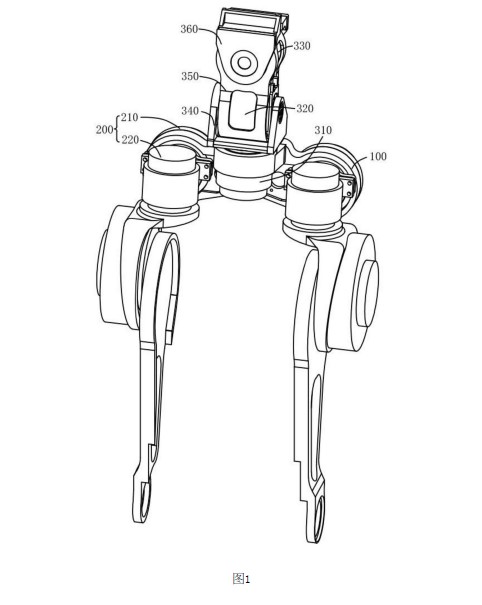
根据至少一个方面,系统可以包括膝关节组件。该膝关节组件包括:第一连杆部件,其第一端机械耦合到机器人腿的上部,并被配置为相对于机器人腿的上部围绕第一枢轴旋转;第二连杆部件,其第一端机械耦合到机器人腿的下部,该下部机械耦合到机器人腿的上部,并被配置为相对于机器人腿的上部围绕第二枢轴旋转;以及线性执行器装置,其机械耦合到第一连杆部件的第二端和第二连杆部件的第二端,当被驱动时,使第一连杆部件相对于机器人腿的上部围绕第一枢轴旋转,并使机器人腿的下部相对于上部围绕第二枢轴旋转。
第一连杆部件可以被配置为相对于线性执行器装置围绕第三枢轴旋转,而第二连杆部件可以被配置为相对于线性执行器装置围绕第四枢轴旋转。在某些实现中,第四枢轴可能与第三枢轴相同,并且第三枢轴可能机械地将第一连杆部件的第二端和第二连杆部件的第二端与线性执行器装置耦合。在某些实现中,第四枢轴可能与第三枢轴不同,第三枢轴可能机械地将第一连杆部件的第二端耦合到线性执行器装置,而第四枢轴可能机械地将第二连杆部件的第二端耦合到线性执行器装置。


发表评论 取消回复