标题:
UNDERACTUATED HAND WITH CABLE-DRIVEN FINGERS
专利号 : WO/2024/0731
摘要:
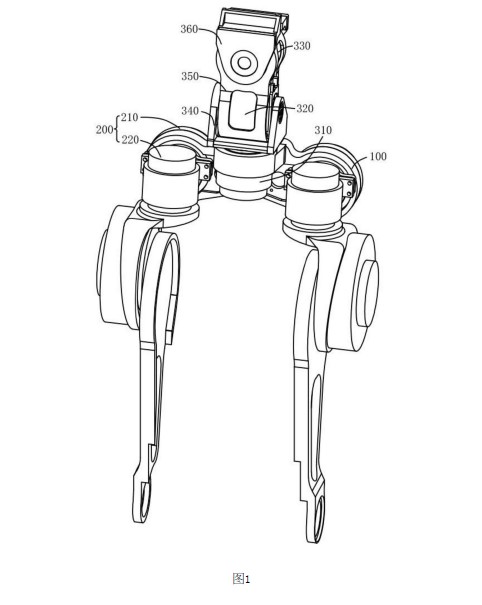
机械手系统可以包括手掌区域和一个或多个手指,每个手指包括一个致动器装置;具有第一端机械耦合到手掌区域机器人并配置为相对于手掌区域围绕第一枢轴旋转的近端构件;具有第一端机械耦合到近端构件的第二端并配置为相对于近端构件围绕第二枢轴旋转的远端构件;以及具有与致动器耦合的第一部分和沿近端部件和远端部件延伸的第二部分的电缆,第二部分与第一枢轴和第二枢轴分离,并且具有比电缆直径更高的尺寸的末端,当电缆被执行器拉动时,具有更高尺寸的一端结构为接合远端部件。
背景及相关描述:
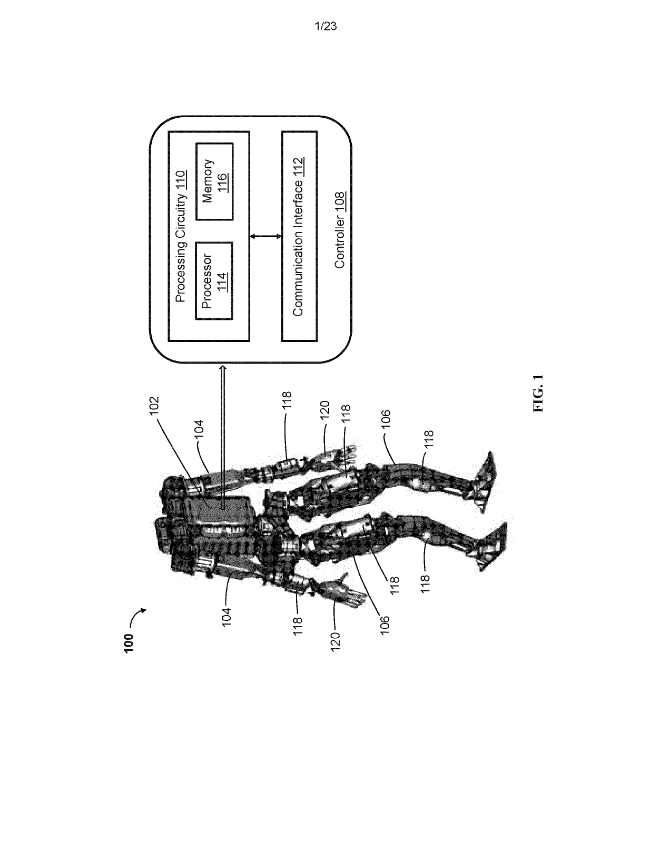
机器人可以被看作是链条或关节的集合,其使机器人能够进行所需的运动。每个关节都使相邻的结构或元素能够相对移动。相邻元件的运动由与接头相关的一个或多个致动器驱动。计算机系统控制执行器以实现所需的运动。
关节的设计定义了相应相邻元件的运动范围。此外,接头设计会影响要使用的执行器的数量和/或类型以及执行器的效率。
由于各种原因,手和手指是机器人的组成部分之一,在设计和优化设计参数方面提出了非常复杂和困难的技术挑战。第一个挑战是如何实现对物体的自适应和稳定抓握。适应性与手指或相应关节根据与另一个物体接触的位置和特征调整其位置和/或运动的能力有关。稳定性是指以物体的方式很好地掌握物体 不会滑倒或跌倒。第二个技术挑战是传动,即力或扭矩如何传递到手指的不同链节或构件。另一个技术挑战是如何优化或提高施加在abj等上的力的效率。这些和其他技术挑战使机器人手和手指的设计成为一个复杂的多维问题,并需要新技术来接近人手的特征或能力。在目前的公开中,描述了用于配置模仿人类手和手指的机器人手和电缆驱动手指的系统和方法。特别地,本文描述的系统和方法提供了一种新颖的电缆在电缆驱动的手指中布线,以实现对物体的更具适应性、稳定性和效率的抓取。本文描述的电缆布线导致不同的力和/或扭矩传输到手指的各种链节或结构,并实现在某种程度上模仿人类手指的运动或位置的运动和/或位置范围。本文中描述的手指通过单个致动器驱动手指的两个关节而驱动不足。
本公开中描述的系统和方法还提供了优化和仿真框架,以实现增强的适应性、稳定性和效率,特别是关于通过本文描述的手和手指抓取物体。具体而言,优化和仿真框架能够优化本文所述的手指设计或手指系统的各种参数。


发表评论 取消回复