标题:
机器人手指关节及机器人
专利公开号:
CN117584166A (在审)
摘要
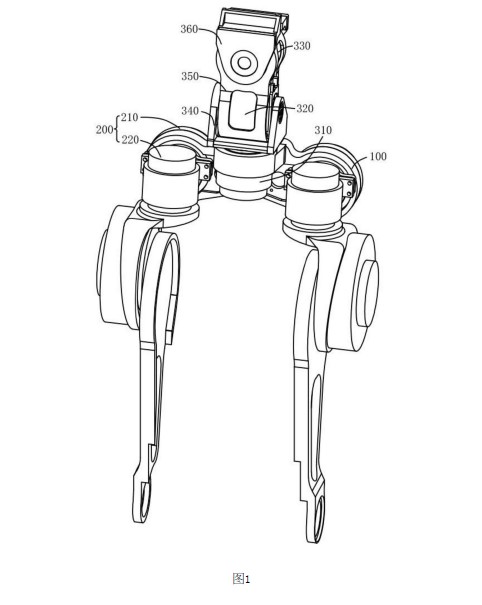
本发明公开了一种机器人手指关节及机器人,机器人手指关节包括:固定框架;第一齿轮组,第一齿轮组包括第一从齿轮和第二从齿轮,第一从齿轮和第二从齿轮相对布置,第一从齿轮和第二从齿轮相对的两个端面分别形成为锥齿轮,且两个锥齿轮的齿数不同以形成传动比,第一从齿轮的轴向设有第三直齿轮,第二从齿轮的轴向设有第四直齿轮;中间转轴,中间转轴上设有中间齿轮,中间齿轮分别与第三直齿轮和第四直齿轮啮合;旋转臂,旋转臂可活动地设在固定框架上,且与中间转轴连接,第一齿轮组根据传动比,将传动动力输出给旋转臂。本发明能够减少机器人手指关节的占用空间,实现旋转臂的灵活转动,有利于机器人手指关节的精度控制,寿命长且成本低。
背景及相关技术描述
现有的机器人手指关节,功率比很低,多级行星减速箱精度难以控制并且占用空间较大。
提供一种机器人手指关节及机器人的新技术方案,至少能够解决现有技术中的机器人手指关节功率比低,精度难以控制且占用空间较大等问题。
本发明提供了一种机器人手指关节,包括:
- 固定框架,所述固定框架内设有安装腔;
- 第一齿轮组,所述第一齿轮组设在所述安装腔内,所述第一齿轮组包括第一
从齿轮和第二从齿轮,所述第一从齿轮和所述第二从齿轮相对布置,所述第一从齿轮和所述第二从齿轮相对的两个端面分别形成为锥齿轮,且两个所述锥齿轮的齿数不同以形成传动比,所述第一从齿轮的轴向设有第三直齿轮,所述第二从齿轮的轴向设有第四直齿轮;
- 中间转轴,所述中间转轴上设有中间齿轮,所述中间齿轮分别与所述第三直齿轮和第四直齿轮啮合;
- 旋转臂,所述旋转臂可活动地设在所述固定框架上,且与所述中间转轴连接,所述第一齿轮组根据所述传动比,将传动动力输出给所述旋转臂,以驱动所述旋转臂相对所述固定框架转动。


发表评论 取消回复