标题:ACTUATOR AND ACTUATOR DESIGN
METHODOLOGY
专利号 :WO2024072984
摘要:
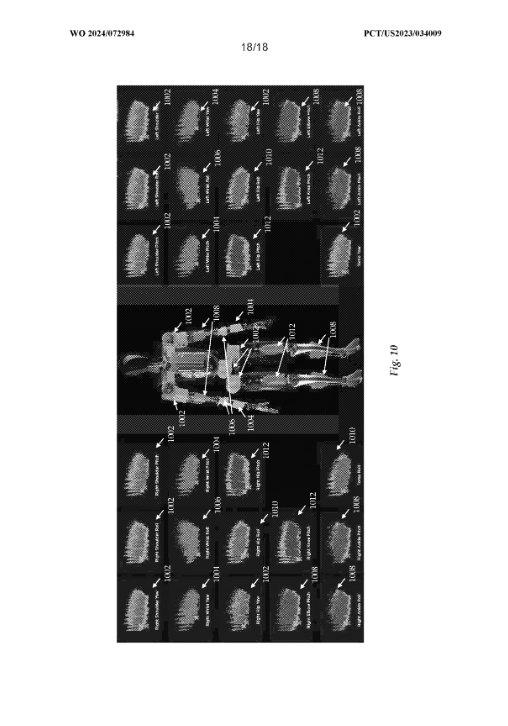
一种使用执行器控制机器人运动的系统或方法,该系统可以包括一个或多个第一类型的执行器,位于机器人的躯干、肩部和臀部位置;一个或多个第二类型的执行器,位于机器人的手腕位置;一个或多个第三类型的执行器,位于机器人的手腕位置;一个或多个第四类型的执行器,位于机器人的肘部和踝部位置;一个或多个第五类型的执行器,位于机器人的躯干位置和臀部位置;以及一个或多个第六类型的执行器,位于机器人的膝盖位置和臀部位置。
背景及相关描述:
神经网络作为一种先进的计算架构,正日益成为现代技术发展的基石,并在多个领域展现出了广泛的应用潜力。其中,一个显著的例子便是在图像处理中,通过用户设备(如智能手机)或相机系统捕获的图像能够利用神经网络进行高效的对象分类。具体而言,这类神经网络通常采用卷积神经网络(CNN)的结构,通过卷积层、池化层以及一个或多个全连接层的组合,实现对图像中描绘对象的精准分类。
此外,神经网络在自动驾驶和半自动驾驶技术中也扮演着至关重要的角色。以无人驾驶飞行器为例,其导航系统部分依赖于神经网络来实现在复杂现实世界环境中的自主导航。在这些系统中,传感器用于实时检测即将接近的物体,而神经网络则能够对这些数据进行处理,指导飞行器安全地绕过障碍物。类似地,机器人技术也广泛利用了神经网络,以实现现实世界中的高效导航。机器人的腿部或臂部结构通常由多个连接器或构件组成,每个构件的运动都由一个或多个致动器独立控制。这些致动器的设计和性能特性对机器人的整体性能有着深远的影响,而神经网络的引入则进一步优化了这些性能参数,提升了机器人的导航效率和精确性。
综上所述,神经网络在图像处理、自动驾驶以及机器人技术等领域均展现出了卓越的性能和广泛的应用前景,为现代技术的发展提供了强有力的支持。


发表评论 取消回复