标题:
灵巧手手指、灵巧手及机器人
专利公开号:
CN116872237A (在审)
摘要
本发明公开了一种灵巧手手指、灵巧手及机器人。该灵巧手手指包括基座、指根节组件、第一驱动组件和第二驱动组件,指根节组件包括连接件和关节轴承,连接件通过关节轴承转动连接于基座;第一驱动组件包括第一转动件,转动连接于基座;第二驱动组件,包括第二转动件,第二转动件转动连接于基座。指根节组件的连接件通过关节轴承转动连接于基座,第一转动件能够带动连接件沿第一方向转动,从而带动手指沿第一方向转动,以使手指能够弯曲,第二转动件能够带动连接件沿第二方向转动,从而带动手指沿第二方向转动,以使手指能够侧摆,本申请的灵巧手手指的自由度高,从而使得手指的灵活性较高。
主权项
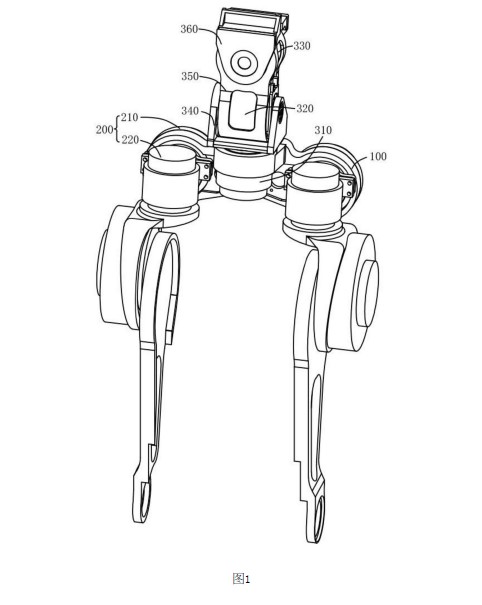
一种灵巧手手指,其特征在于,包括:
基座(11);
指根节组件(12),包括连接件(121)和关节轴承(122),所述连接件(121)连接于所述关节轴承(122),所述关节轴承(122)连接于所述基座(11),以将所述连接件(121)转动连接于所述基座(11);
第一驱动组件(13),包括第一转动件(131),所述第一转动件(131)转动连接于所述基座(11);
第二驱动组件(14),包括第二转动件(141),所述第二转动件(141)转动连接于所述基座(11);
其中,所述第一转动件(131)能够带动所述连接件(121)沿第一方向转动,所述第二转动件(141)能够带动所述连接件(121)沿第二方向转动。
有益效果与技术优势:
有益效果:
手指高自由度设计,实现灵活弯曲与侧摆,提升操作灵活性。
结构紧凑,利于小型化设计,降低成本与空间占用。
技术优势:
高灵活性:模拟人手多动作,增强操作适应性。
结构简化:复杂传动系统优化,保持高效同时简化结构。
精准控制:电位计监测转动角度,确保操作精度。
小型化:便于集成于多种设备,拓宽应用场景。
耐用可靠:强化承力设计,提升抗冲击能力。
多功能性:兼容多种工具抓握,扩大使用范围。


发表评论 取消回复