标题:
一种机械灵巧手手指及灵巧手
专利公开号:
CN117001706A (在审)
摘要
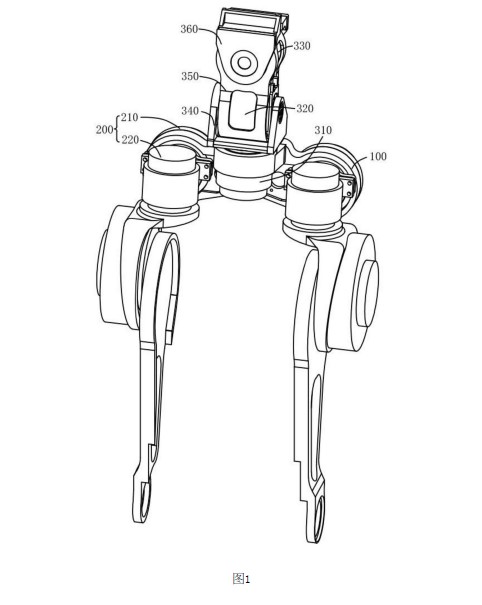
本发明涉及一种机械灵巧手手指及灵巧手,该机械灵巧手手指包括:手掌基座;手指指节,其包括依次连接的指根节、中指节与远指节;指根 组件,其包括转动安装在所述手掌基座上的指根转轴、设置于所述指根转轴上并匹配安装所述指
根节的球面轴承;弯曲传动机构,其包括主动锥齿轮、从动锥齿轮、指根传动件和屈指轴;侧摆传 动机构,其包括安装在手掌基座上的侧摆驱动件、与所述侧摆驱动件连接的侧摆传动轴,所述侧摆传动轴在侧摆工作中与所述指根节保持接触。与现有技术相比,本发明可以满足灵巧手指 关节的侧摆,弯曲,同时保证占据体积小的同时 提供一定的抓握力和耐久性。
背景及相关技术描述
机器人灵巧手是一种具备高度灵活性和精确控制能力的机器人手部装置。它模仿
人类手的结构和功能,具备多个关节和指节,并且能够实现精确的运动和抓取能力。根据驱动方式,灵巧手分为线驱和电动驱动两种。线驱的灵巧手结构紧凑、高灵敏度但耐久性和可靠性差,同时装配困难,目前无法应用在工业化生产中。而电动驱动的灵巧手具备耐久性和可靠性,但无法做到结构紧凑和高自由度。
灵巧手的手指根据关节可以分为近指关节、中指关节、远指关节。而目前机器人的指关节结构创新大多在中指关节和远指关节满足弯曲功能的传动结构上。例如专利CN101088721A公开的机器人灵巧手手指基关节机构,通过双带轮交叉传动,满足两个指节的解耦控制;而受限手部空间,大多数灵巧手手指可实现指节的弯曲,但是无法实现指节的侧摆。同时无法满足手的抓握力。
本发明的技术方案之一提供了一种机械灵巧手手指,包括:
·
手掌基座;
·
手指指节,其包括依次连接的指根节、中指节与远指节;
·
指根组件,其包括转动安装在所述手掌基座上的指根转轴、设置于所述指根转轴 上并匹配安装所述指根节的球面轴承;
·
弯曲传动机构,其包括主动锥齿轮、从动锥齿轮、指根传动件和屈指轴,所述从动锥齿轮固定套在所述指根转轴上,所述主动锥齿轮安装在所述手掌基座上,并与所述从动锥齿轮啮合,所述屈指轴固定安装在所述指根转轴上,并在弯曲转动工作中与固定连接在所述指根节上的所述指根传动件保持接触;
·
侧摆传动机构,其包括安装在手掌基座上的侧摆驱动件、与所述侧摆驱动件连接的侧摆传动轴,所述侧摆传动轴在侧摆工作中与所述指根节保持接触。


发表评论 取消回复