标题:
机器人灵巧手及机器人
专利公开号:
CN116766239A (在审)
摘要
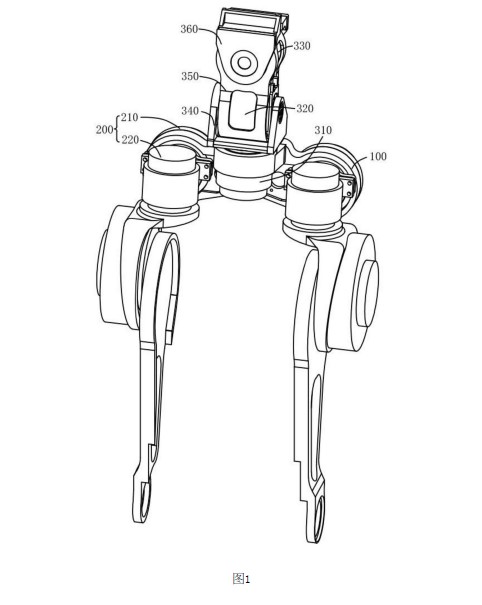
本发明公开了一种机器人灵巧手及机器人。该机器人灵巧手包括手掌主板、多个第一手指和第一驱动组件;多个第一手指分别转动连接于手掌主板;第一驱动组件包括第一驱动件和多个第一传动组件,第一驱动件安装于手掌主板,每个第一传动组件的输出端传动连接于一个第一手指,第一传动组件的输入端传动连接于第一驱动件;其中,第一驱动件能够通过多个第一传动组件带动多个第一手指摆动。本申请提出的机器人灵巧手能够通过一个第一驱动同时带动多个手指摆动,从而能够节约空间占用,有利于提高机器人灵巧手的结构的紧凑性。
背景及相关技术描述
相关技术中,机器人灵巧手通常安装在仿人形机器人的机械臂末端,可以像人类的手一样,在不同场景下抓握为人设计的工具。机器人手掌主板一般连接有多根灵巧手指,
具有高自由度的同时,有一定抓握能力。而目前的灵巧手的每根手指均需要对应设置一组驱动件进行驱动,从而占用空间较大,不利于提高灵巧手结构的紧凑性。
提供一种机器人灵巧手的新技术方案。根据本发明的第一方面,提供了一种机器人灵巧手。该机器人灵巧手包括:
- 手掌主板、多个第一手指和第一驱动组件;
- 多个第一手指,多个所述第一手指分别转动连接于所述 手掌主板;第一驱动组件,包括第一驱动件和多个第一传动组件,所述第一驱动件安装于所述手掌主板,每个所述第一传动组件的输出端传动连接于一个所述第一手指,所述第一传动组件的输入端传动于所述第一驱动件;
- 其中所述第一驱动件能够通过多个所述第一传动组件带动多个所述第一手指摆动。


发表评论 取消回复