标题:
一种兼顾旋转和侧摆的机器人灵巧手
专利公开号:
CN220826015U
摘要
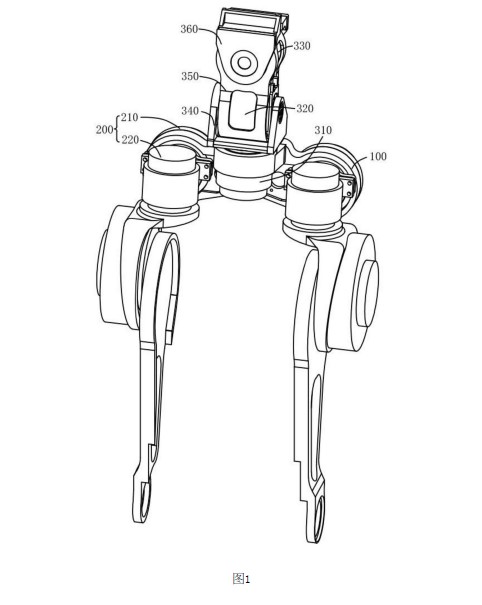
本实用新型涉及一种兼顾旋转和侧摆的机器人灵巧手,包括:手指部,其包括依次拆卸式连接的指尖分部、指中分部、指根分部,所述指尖分部与指中分部,指中分部与指根分部分别通过第一传动组件连接,用于实现各分部的弯曲;手掌部,其包括手掌以及连接所述指根分部与手掌的第二传动组件,用于实现所述手指部沿其排列方向的侧向摆动。与现有技术相比,本实用新型通过多步传动组件巧妙的同时实现若干手指部的侧向摆动和弯曲旋转,减少电机数量的同时满足侧摆自由度的需求,使结构更加精简的同时减少成本,通过指尖分部、指中分部和指根分部的模块化手指部,每一模块均能进行拆卸和组装,方便进行维护更换,也减少了维护成本。
背景及相关技术描述
机器人灵巧手是机器人的必备部件,装备在机器人上经运行操作后,传统的灵巧手手指容易磨损,而在磨损后需要对整个手部进行拆装,但是传统的灵巧手手指之间一般为牵连结构,因此每次拆装过程非常复杂耗时。现有专利CN111673781A公开了一种变刚度仿人机器人手抓,其手指为一体化设计,无法做到单独的拆装每个指节,也不具备侧摆功能。
传统的灵巧手除了旋转握爪功能之外,也有部分具有侧摆功能,但是传统灵巧手 侧摆采用单电机对应驱动每个手指关节进行侧摆运动,导致电机使用数量较多,占据空间较大等问题的产生。因此亟需一种容易装配的,自由灵活,具有高自由度的灵巧手。
提供一种兼顾旋转和侧摆的机器人灵巧手,包括:
·
手指部,其包括依次拆卸式连接的指尖分部、指中分部、指根分部,所述指尖分部与指中分部,指中分部与指根分部分别通过第一传动组件连接,用于实现各分部的弯曲;
·
手掌部,其包括手掌以及连接所述指根分部与手掌的第二传动组件,用于实现所
述手指部沿其排列方向的侧向摆动。


发表评论 取消回复